博思美学院
隐形矫治虚拟动画与现实落差(一) | 台湾专家课堂笔记
2018-07-27 by 波波

▼▼▼
7月26日博思美30个社群同时在线直播,
来自宝岛台湾讲师专家陈彦宏医生,
乐沛牙科诊所负责人,
台湾隐形矫正学会会员,
台湾微整型美容医学会专科医师,
分享隐形矫正课程 【隐形矫治虚拟动画与现实落差(一)】,
各位医生的反馈都不错,
下面波波就为大家带来本次课程的回顾 ,
请及时收藏哦。
本次课程的目的在于让各位医生了解隐形矫治动画和实际效果造成不一致的原因和预防措施。

由于隐形矫治电脑模拟的牙齿移动是线性的移动,而口内牙齿移动是综合生理、矫治力所产生的一个综合性的结果,所以经过每副矫治器的佩戴之后,可能产生和实际牙齿移动的差异,经过一段时间的佩戴之后,这些差异会累积,造成和动画排列不一致的情况。左下图是我们理想中应该排列到的状态,右下这张图是我们经过一段时间隐形矫治所排列的结果。所以在以下的内容中和大家分享电脑动画和实际牙齿排列的差异背后的原因。
电脑动画和实际患者口内的差异所表现出的情况就是以下这张照片,隐形矫治器和牙齿产生不贴合,那我们称之为脱轨(off tracking)。为什么称之为脱轨?因为隐形矫治器就像火车的轨道,牙齿应该在这条轨道上进行移动达到目的地,火车脱离轨道称为脱轨,如果牙齿没有按照预定的轨道进行移动,我们也称之为脱轨(off tracking)。

下图是2009年时美国的一篇研究,这篇研究中指出,隐形矫治器让牙齿移动的平均精确度是40%左右。什么是隐形矫治器的平均精准度?平均精准度定义为达成的量/计划的量,也就是设计应该有的移动量的百分比。举个例子来说,如果设计2mm的移动,平均精准度只有40%的话,实际移动量为0.8mm。如果设计了1°的扭转,按平均精准度40%计算,实际扭转为0.4°。我们需要去分析是什么原因导致了牙齿移动的不到位。

这篇文献中也提出70%的案例需要中期调整或者是精细调整。中期调整举例来说,就是如果说设计了50副隐形矫治器,戴到第25副时产生不贴合,无法继续进行后续牙套佩戴,需要重新设计并生产矫治器,我们称之为中期调整。精细调整是顺利佩戴完所有矫治器后,有个别牙或是多个牙齿的状态不够理想,还需要轻微调整,那我们称之为精细调整,而只有30%左右的病例能够顺利佩戴完所有矫治器直接完成。如果深入分析的话,我们可以发现这些30%直接完成的病例可能都是比较简单的案例。

病例分析
患者主诉:上下牙列拥挤,面型突。
原治疗计划:拔除4个前磨牙排齐牙列,改善突面型。
先治疗计划:由于患者不想拔牙,所以采用磨牙远移配合去釉和扩弓的方式解除拥挤。
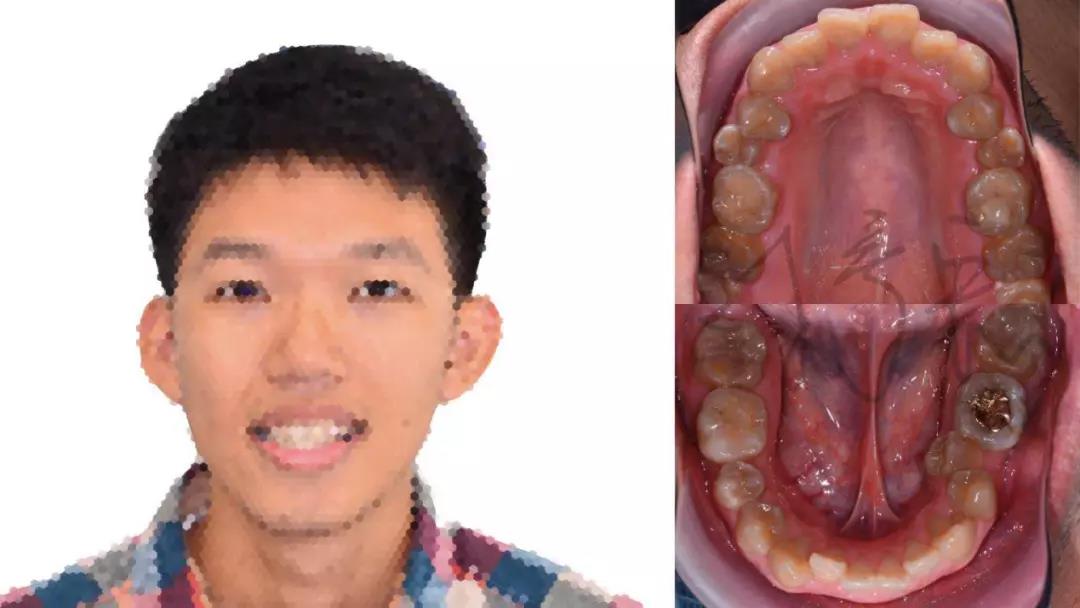
下图是患者矫治中的状态,上面三张图隐形矫治器还是比较贴合的,戴到24步时我们可以看到矫治器稍微有点不贴合,那到43副时,矫治器不贴合情况已经很明显了。矫治中患者依从性良好,我们应该思考下是什么原因导致了这个结果。

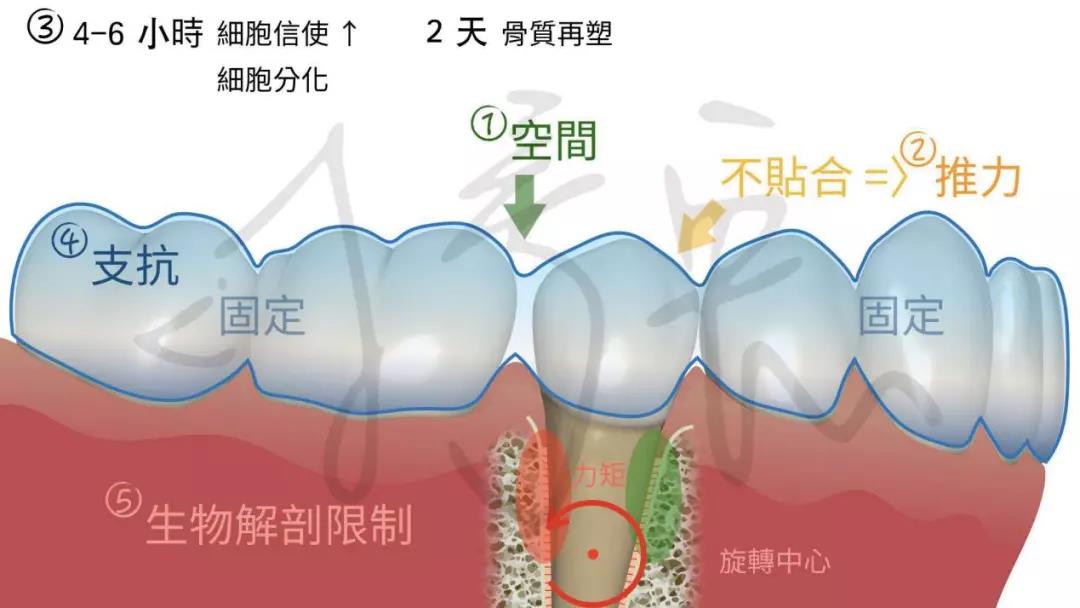
在了解隐形矫治器为什么会脱轨之前,我们先看下隐形矫治器是如何使牙齿移动的。隐形矫治器如果要让牙齿移动,首先要有一个空间,患者戴上新的矫治器后有的牙齿位置时固定的,有的牙齿位置时不贴合的,不贴合位置的牙齿矫治器会产生一个推力,牙齿受到力量和力矩,牙齿往有空间的方向去移动,牙齿移动之后,牙周膜细胞成分增加,并可分化成为成骨细胞和破骨细胞。在牙周膜受牵引侧,成骨细胞大量增殖,沿牙槽骨产生和沉积新生骨组织;在牙周膜受压侧,破骨细胞大量集聚,使牙槽骨吸收。
|隐形矫治器让牙齿移动的五个要素
-
空间(如果没有空间,牙齿可能会往不希望的位置移动)
-
矫治力(施力方式不正确会导致牙齿无法移动)
-
时间(患者佩戴时间太短,牙齿可能无法移动到位)
-
支抗(支抗不足会导致不是目标牙齿的移动)
-
生物解剖的限制(会导致牙齿的异常移动)
在患者方面, 患者要佩戴足够的时间,并配合咬胶使矫治器贴合,保证矫治器的力量传导到牙齿上,佩戴的同时,必要时可以用橡皮筋来增加力量和支抗。
在医生方面需要考虑的是空间、推力、时间、支抗还有生物解剖限制,所以考虑的是多方面的。
隐形矫治监控一方面是患者的依从性问题,另一方面是医生可以控制干预的。
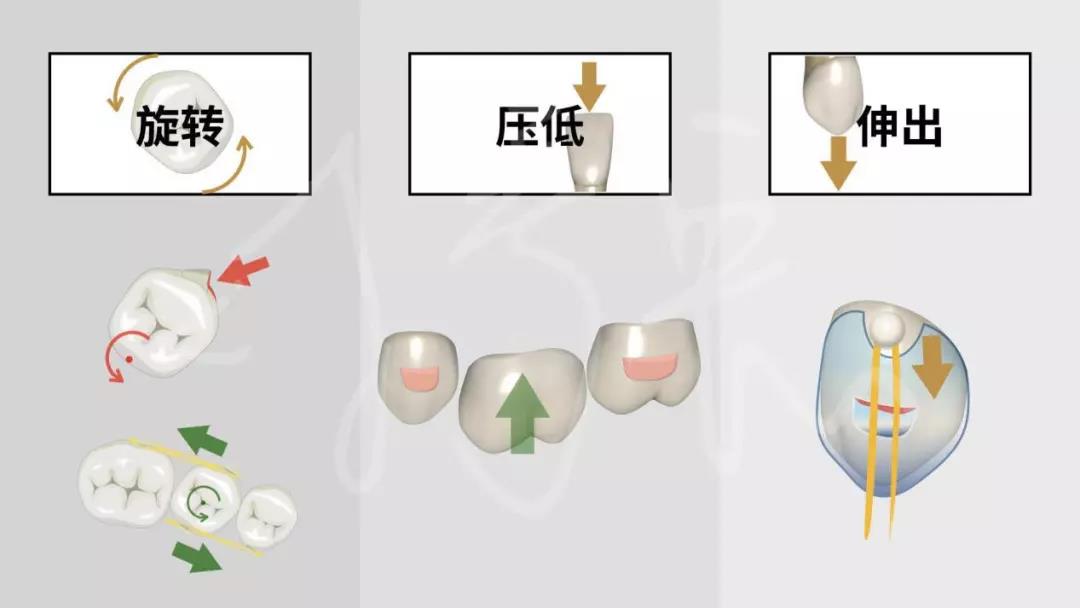
为了帮助各位医生分析在设计动画的时候怎么做,才能降低牙套脱轨的风险,所以把牙齿移动分为了四个种类:排齐、纵轴调整、冠状轴的调整、失状轴的调整。这样可以帮助医生从这四个方向去思考牙齿移动的形式,牙齿排列包括扭转问题,纵轴方面包括牙齿的压低和伸长,冠状轴包括前牙近远中和后牙颊舌侧方向的移动,失状轴包括前牙唇舌侧移动和后牙近远中方向的移动。下面会着重介绍牙齿扭转、压低和伸长的移动。

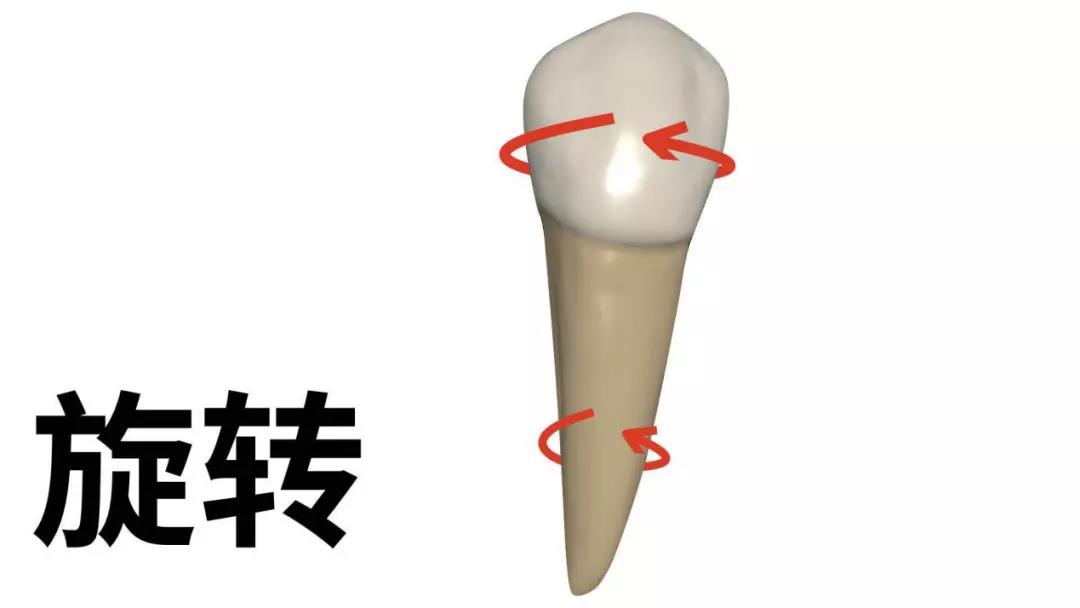
扭转移动
扭转移动是牙齿沿着长轴做旋转的移动,扭转移动时牙齿周围的牙周韧带处于被拉扯的状态,不像很多移动是一半的牙周韧带是被拉扯,一半的牙周韧带是被压缩的,所以新的骨质沉积会比较困难,容易复发。
如左图所示,当牙齿的中央窝沟的连线不是一条连续的弧线,代表牙齿有扭转的问题,需要对相应的牙齿进行扭转。另一种我们需要做扭转移动的情况是当牙齿扩弓时,分析磨牙是否有扭转的情况,必要时适当的近中颊侧扭转第二磨牙,前面6-6就能得到更多的空间进行排齐。
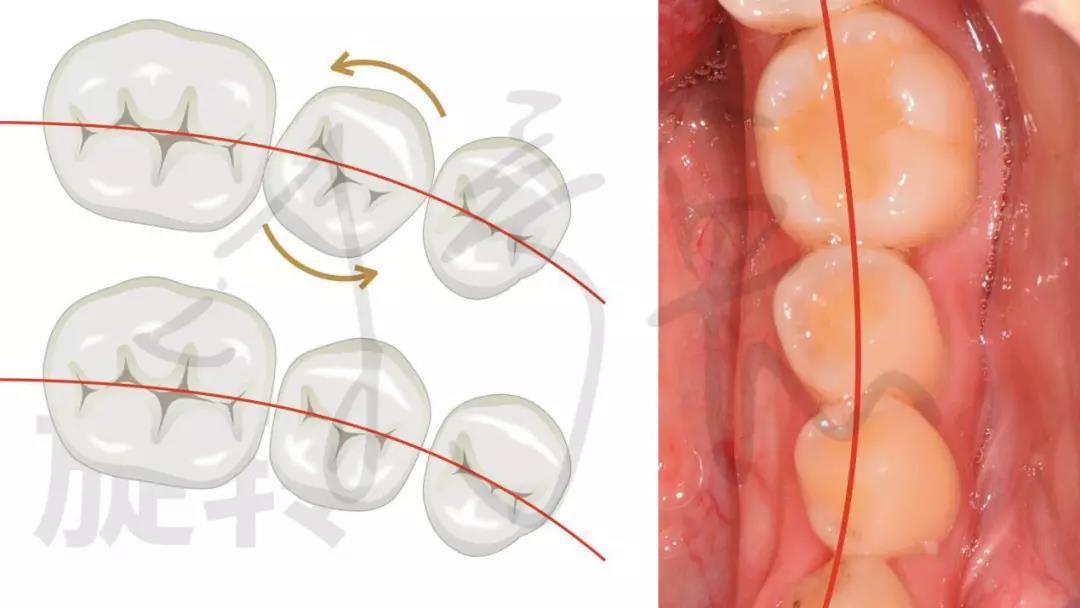
根据2008年的这篇研究,切牙用隐形矫治做扭转移动的准确率有55%,尖牙和前磨牙做扭转移动的准确率只有30%。原因是切牙的形状是扁平的,矫治器可以较好的包裹牙齿,隐形矫治器会在牙齿上产生显著的施力点,这些施力点会让牙齿进行扭转移动,而尖牙和前磨牙的形状是偏圆润的,对于矫治器的施力是有难度的,扭转移动会相对困难。

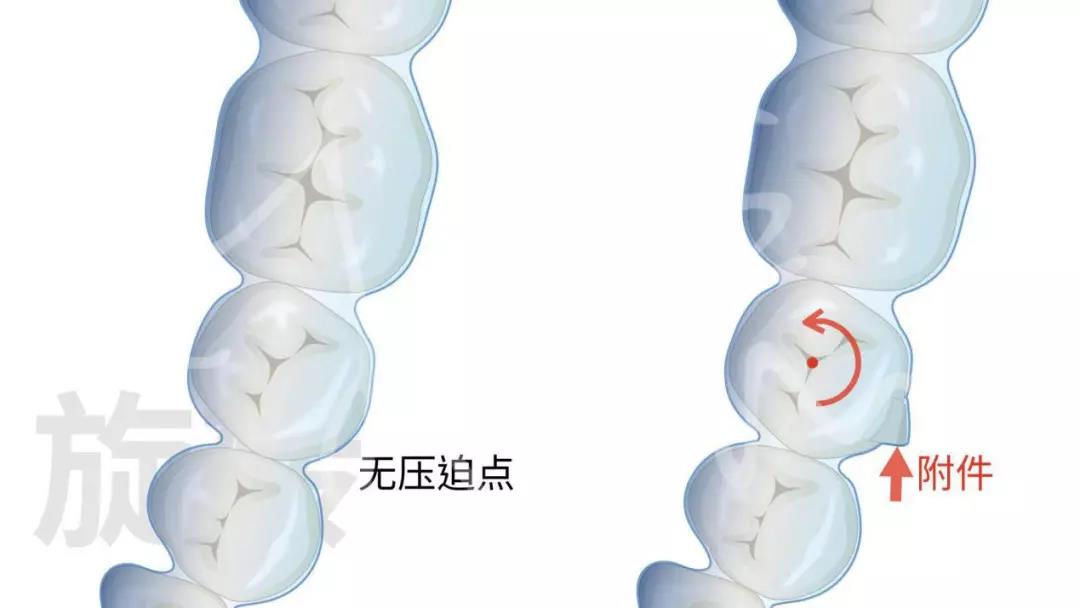
下左图是在没有附件情况下的示意图,矫治器在前磨牙上很难形成施力点,所以我们会利用附件粘结在扭转牙上,使矫治器产生施力点,从而使牙齿进行扭转移动。
案例分析
下图是解除拥挤的一个病例,矫治前状态下颌左右第二前磨牙的中央窝沟和其他牙齿不一致,有扭转的情况,设计中我们在下颌左右第二前磨牙的颊侧粘结了附件,希望可以通过附件做扭转的移动。在25步时,前牙已经排齐,后牙的中央窝沟已经基本对齐,尤其是右下第二前磨牙的扭转已经纠正。通过对比矫治前后左下第二前磨牙,发现扭转纠正效果不是特别明显。

当隐形矫治器没有让牙齿按理想位置做扭转移动,隐形矫治器会在牙齿表面产生不必要的施力点,这些力会使牙齿压低,最终会导致矫治器不贴合。
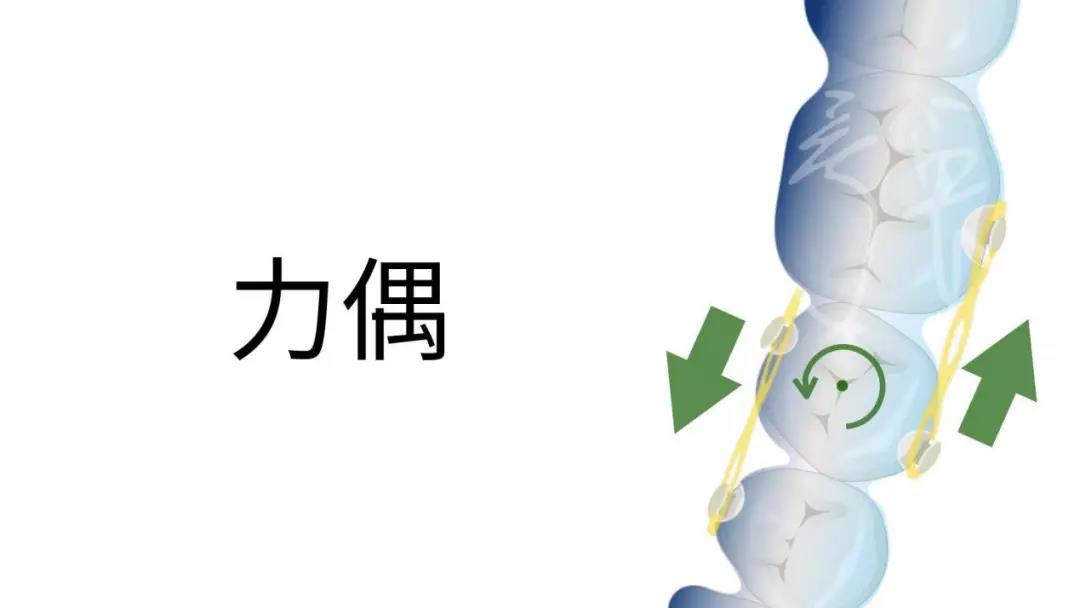
右侧图如果让牙齿做原地扭转的话,施力点是在近中颊侧和远中舌侧处,因为近中颊侧因为有附件,所以受到的力会比较大,远中舌侧的施力点因为靠近邻接处,所以相对的受力会较小,舌侧施力的方向和颊侧没有平行,所以不会产生力偶(力偶定义为作用于同一物体上的一对大小相等、方向相反、但不共线的一对平行力称为力偶),同时舌侧的力臂也很短,牙齿原位扭转困难。

为什么同样的扭转牙,右侧下颌第二前磨牙扭转就得以纠正?
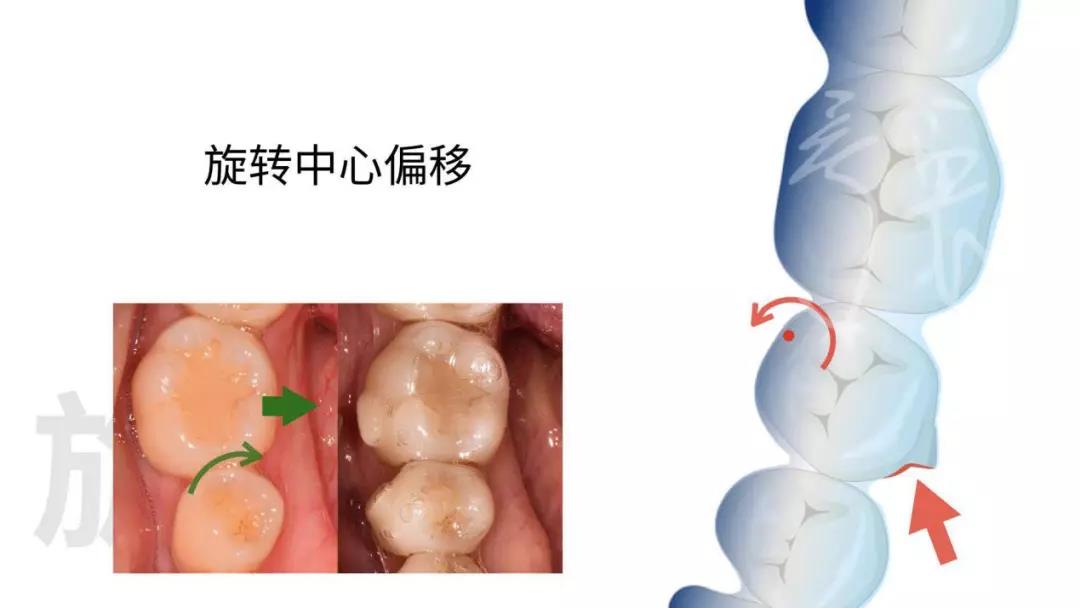
我们看左下图,患者46需要向舌侧做移动,45的扭转移动其实不是原地扭转,而是往远中舌侧的方向做扭转,隐形矫治器会在牙齿的近中颊侧处产生施力点,舌侧基本没有施力点,这样旋转中心就会偏移,旋转中心一旦偏移,这样的扭转可预测性就会比较高,所以纠正了45的扭转。
通过这个案例,我们可以知道隐形矫治器如果需要对牙齿做原地扭转会比较困难,达成率会比较低,但如果做的是旋转中心偏移的扭转方式,扭转的成功率会比较高。
如果希望牙齿原地扭转,就需要产生一对力偶。常用的方式是利用牵引的方式在所需要扭转的牙齿颊舌侧放置舌侧扣,在相邻近远中牙齿的颊侧和舌侧放置
舌侧扣,利用牵引形成力偶,在扭转牙齿颊舌侧形成一个大小基本相等方向相反的力量,让牙齿进行原地扭转。
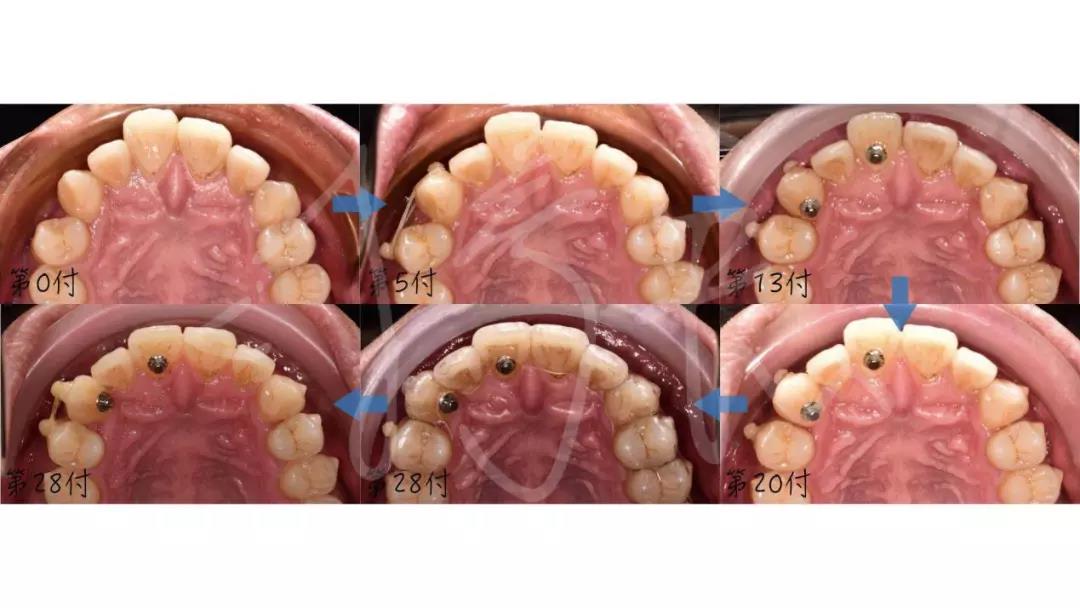
下图是患者实际口内牵引的状态,左上图为患者矫治前的状态,矫治中我们在13颊舌侧、11舌侧、14颊侧放置了舌侧扣,帮助13、14扭转。患者在28副时13、14扭转基本解除,11也内收了一些,再对比28副时的23和矫治前的23,23扭转角度变化不明显,再次验证了如果隐形矫治器让尖牙进行扭转移动,光靠隐形矫治器是比较困难的,必要时需配合牵引的方式去辅助解决尖牙扭转问题。
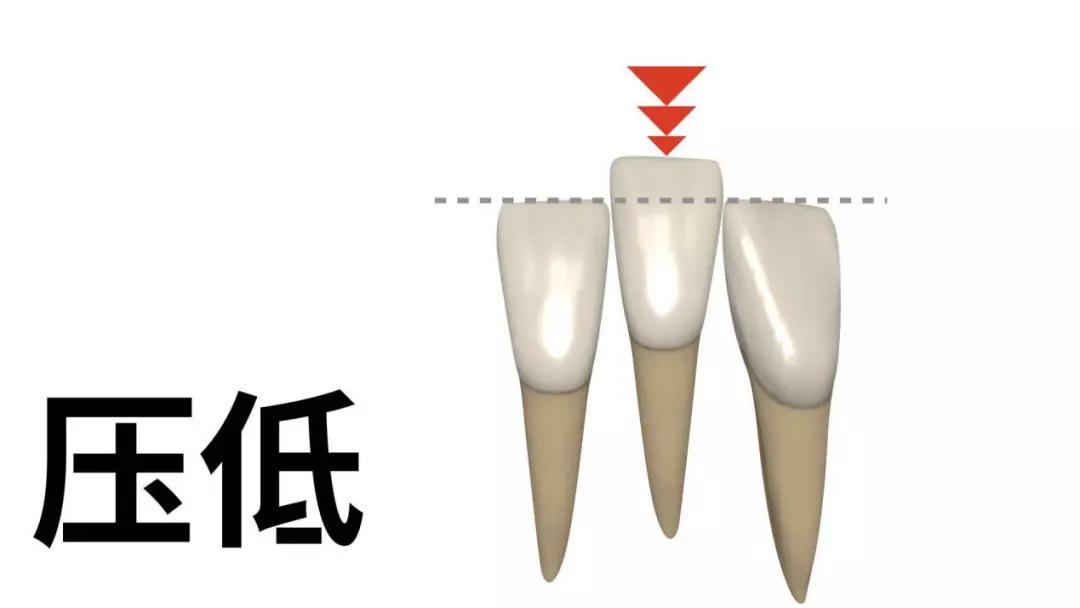
低压移动
把牙齿压低需要的力量较小,一般只需要10-20g的力量。
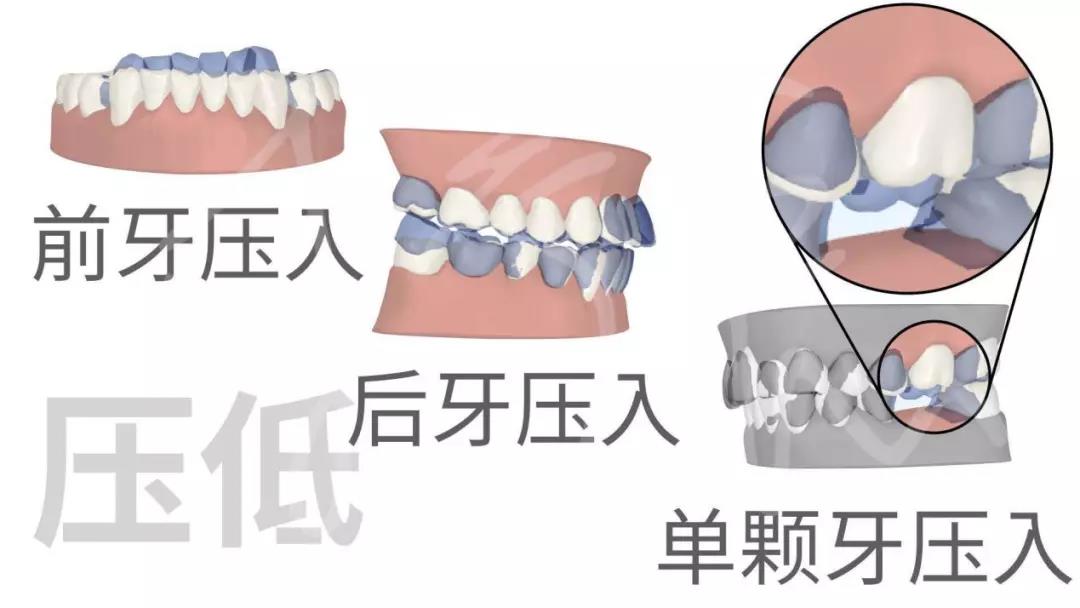
下图的三种类型是我们矫治中需要压低的情况,第一种是前牙深覆合,我们会考虑把上下前牙进行压低,具体压低量要结合患者是否有露龈笑等情况决定。第二种情况是前牙开合,后牙平面角比较高的情况下,我们可以压低后牙从而降低垂直向的高度,减小面下三分之一的长度,改善前牙开合。第三种情况是牙齿缺失导致对合牙伸长,如果缺牙处需要做修复,那对合牙就要设计压低。
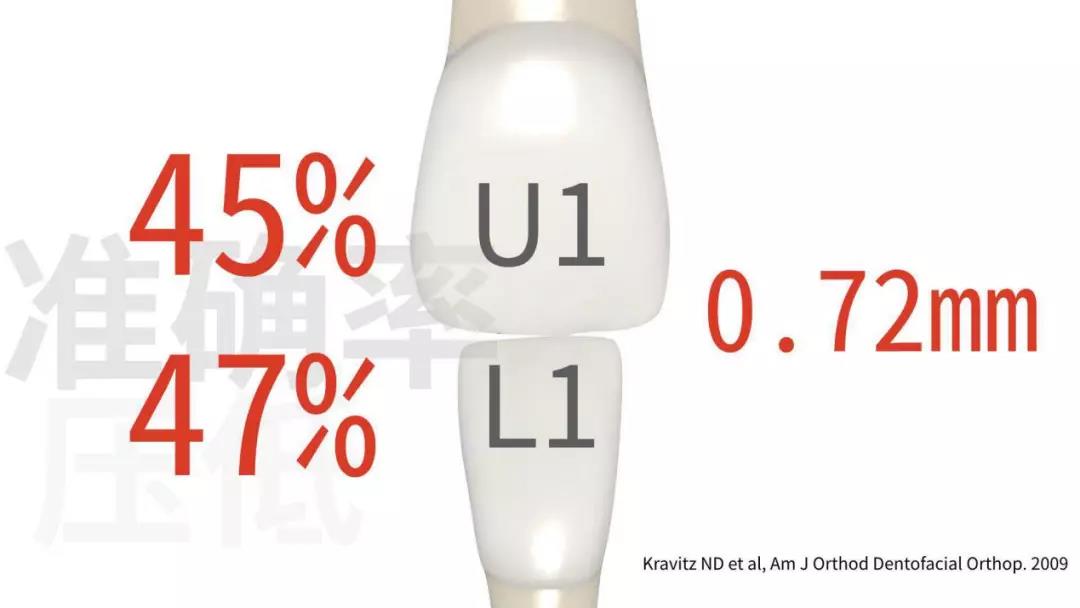
2009年的那篇文献中也指出,上下前牙压低的准确性分别是45%和47%,实际压低的量是0.72mm。如果我们设计1.5mm压低量的话,最终达到的效果在0.7mm左右。
案例分析
这个病例是前牙深覆合,34、44长期缺失,下颌左右侧后牙往近中倾斜,前牙也往舌侧倾斜,造成前牙深覆合的情况。一开始的矫治计划是将后牙往远中倾斜,前牙唇倾压低,希望可以预留出下颌34、44空间已经改善前牙深覆合。

下图是患者矫治的照片,戴到第20副时,前牙区出现明显的不贴合状态,是因为在设计中3-3同时被压低,但实际矫治中33、43没有被压低,就会产生前牙区2-2不贴合情况。
我们需要考虑的问题是33、43为什么无法被顺利压低?
因为我们在压低牙齿的时候需要考虑前后牙的支抗,而这个病例下颌左右侧后牙只有6颗牙齿,如果要通过后面6颗牙齿去压低前牙显然是明显不足的。另外在压低前面6颗牙齿时,后面的牙齿也在移动,所以可以提供的支抗就更少,导致33、43无法压低。
正确的低压设计方式
下颌33、43先不设计压低,33、43作为支抗牙,把下前牙2-2先压低,等到2-2压低结束之后,2-2和后牙做为支抗牙压低33、43。这样的移动称之为阶段性压低,这样的压低移动的精确性可以大幅提高。

案例分析
患者矫治下前牙拥挤度比较大,42和31在比较高的位置,经过阶段性压低牙齿之后,下前牙3-3已经处于一个平面。
所以当6颗前牙需要被压低的时候,如果设计阶段性移动,效果相对将会比较确切。

如果需要设计压低已经伸长的牙齿,我们需要在已经伸长牙齿的近远中邻牙上设计附件,目的是增加矫治器的固位,将矫治器紧贴合面,使已经伸长的牙齿压低,再者,近远中邻牙上的附件可以提供相应的支抗,将矫治器的力量较好的传导到这颗已经伸长的牙齿上。
案例分析
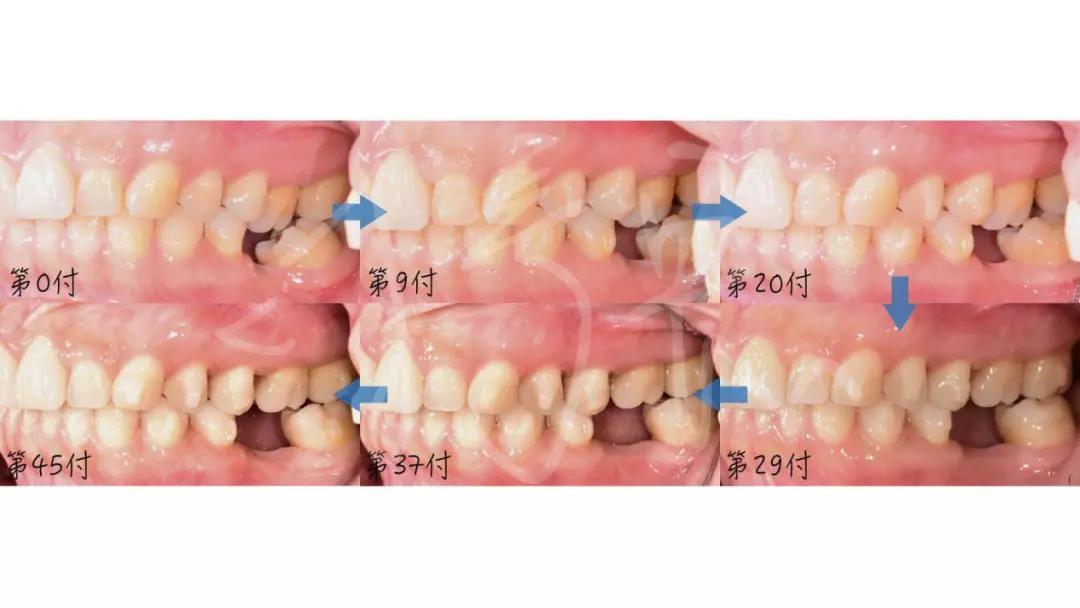
我们在下面那个病例中在25、27上设计了附件,以增加支抗来压低26,同时需要注意的是,在压低26前,需要开辟出26压低的邻间间隙。29副时26已经基本被压低,37远中倾斜也已完成,因为解决前牙问题的关系,所以45步才完成矫治。
总结
当以一种正确的方式去设计压低移动,隐形矫治对于压低的效果是比较确切的。所谓正确的设计是在压低牙齿之前,我们需要考虑牙齿的支抗是否足够,确保在支抗足够的情况下去压低牙齿,以获得较好的效果。
伸长移动
隐形矫治器对于牙齿的施力是推力为主,而不是拉力,所以伸长移动也是相对比较困难的。
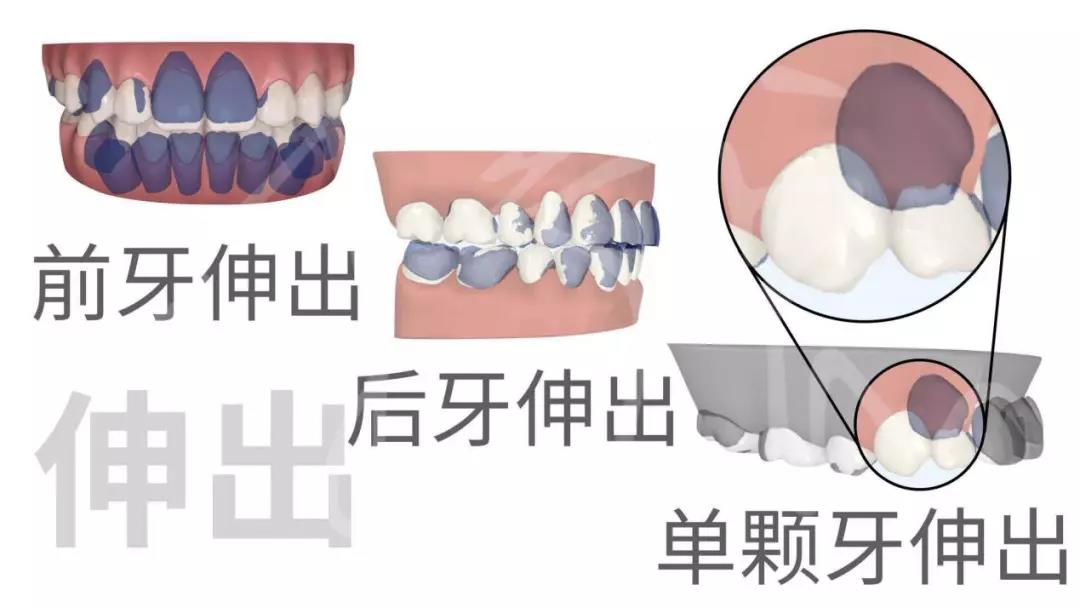
下图的三种类型是我们矫治中需要伸长的情况,第一种是前牙开合,前牙伸长的设计。第二种是后牙伸长帮助前牙打开咬合或者是后牙开合的情况也要设计后牙伸长。第三种单颗牙伸长,常见于还没萌出完全的牙齿,或者是比较高位的唇向错位的尖牙,需要将尖牙伸长。
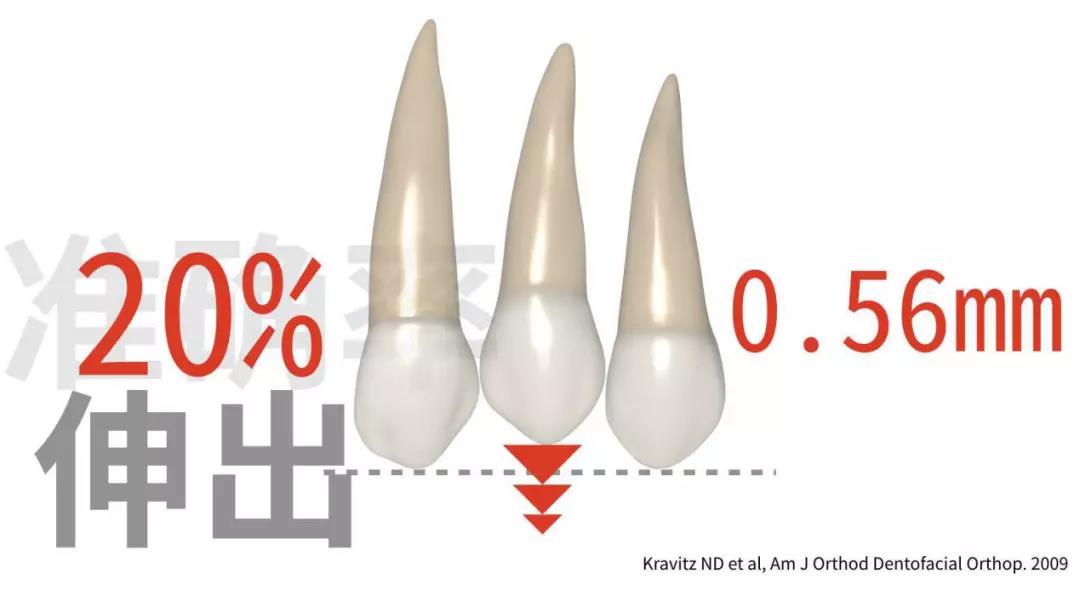
因为隐形矫治器的作用力是推力而不是拉力,所以对于伸长的准确率相对较低,2009年的文献指出,伸长的准确率只有20%,实际伸长量在0.56mm,如果我们设计伸长量为1mm时,那实际伸长量为0.2mm。
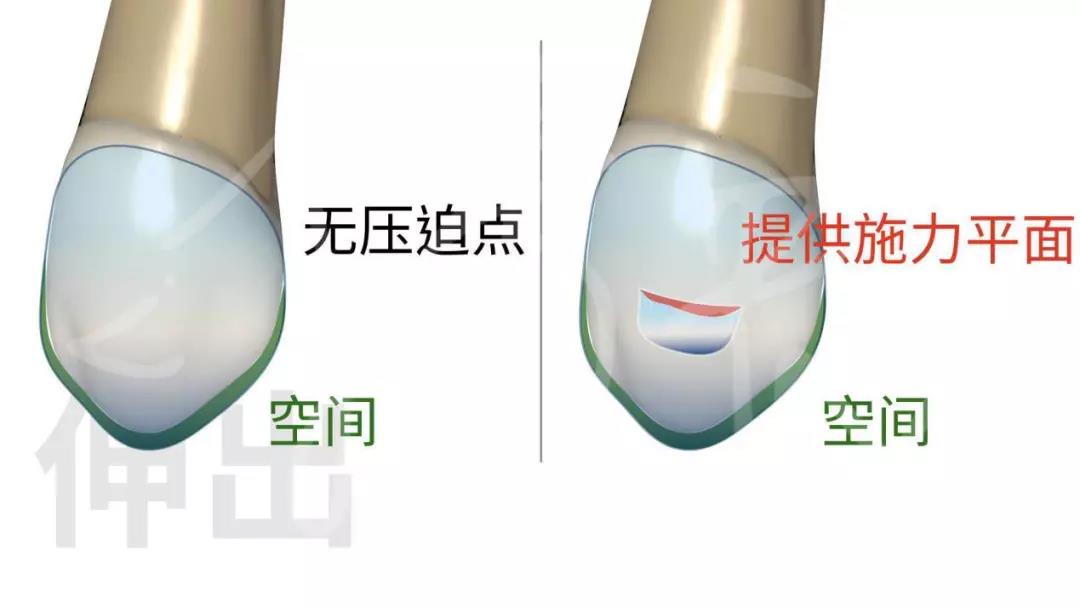
原因是隐形矫治器很难对牙齿进行咬合方向施力,如果需要牙齿伸长的话,就要设计附件在牙齿表面,由附件提供施力平面,产生一个往咬合方向的力量,使牙齿伸长。
案例分析
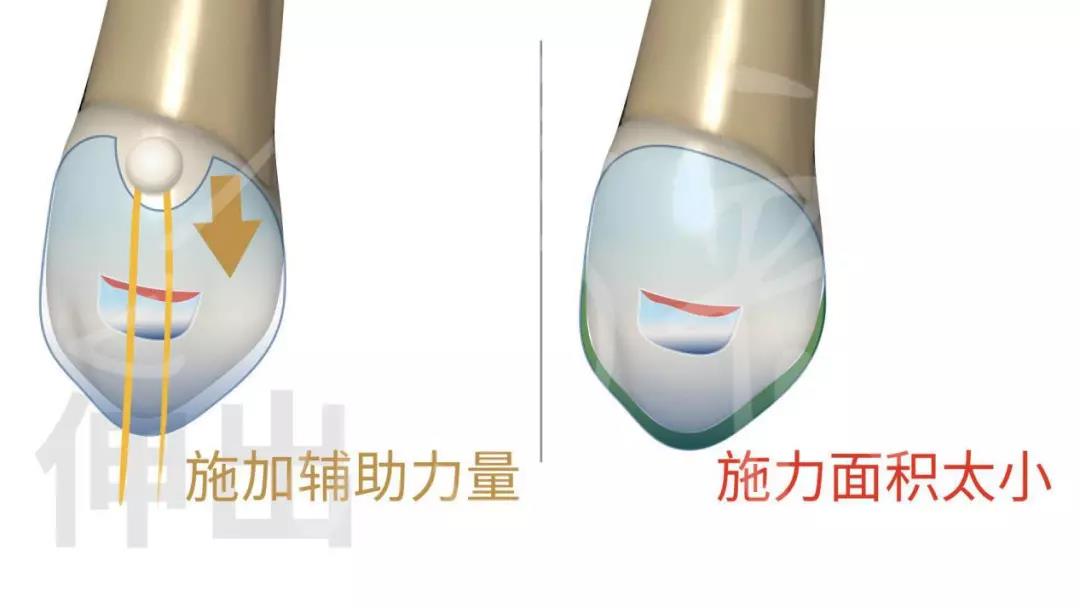
这个病例矫治前13是唇侧错位的状态,我们在12上设计了附件,主要目的为了帮助12往唇侧移动和伸长。第35副的照片可以看到12纠正反合后,矫治器和12已结明显不贴合,

因为这个附件所提供的施力面积太小了,如果需要把牙齿伸长,需要的力为35g-60g的力量,也就是压低移动2倍到3倍的力量。所以我们需要牙齿伸长移动时,要考虑要其他辅助手段帮助牙齿伸长。下左图所示,可以在需要被伸长的牙齿上放置舌侧扣,用橡皮筋牵引的方式帮助牙齿往合方移动,而不仅仅是靠矫治器的力量。
总结
1.扭转移动:需要考虑设计一个旋转中心偏移的移动,如果需要原地扭转,那就要考虑设计牵引产生力偶帮助牙齿原地扭转。
2.压低:支抗的考虑,支抗的控制包括在需要被压低的牙齿近远中邻牙处放上附件或者进行分阶段压低。
3.、伸长:矫治器对原位伸长的移动是相对困难的,在需要牙齿的伸长移动时利用其它辅助方式帮助牙齿伸长。
文案:波波
编辑:美美
校正:微笑大使



